
|
引言 随着端到端智能驾驶技术的快速发展,传统仿真测试方法面临着数据置信度不足、场景构建成本高昂、泛化能力有限等挑战。在这一背景下,LogSim闭环仿真作为一种基于真实数据驱动的仿真技术,正成为推动高阶智驾算法迭代的重要技术路径。 概念解析 LogSim闭环仿真:基于真实行车记录数据(Log Data)构建的闭环仿真系统,能够将实际采集的驾驶场景转换为可交互、可编辑的仿真环境,支持算法的反复测试与优化。 4DGS技术:四维高斯点云重建技术(4D Gaussian Splatting),通过融合时空信息实现动态场景的高保真重建,为LogSim提供了更强的场景还原能力。
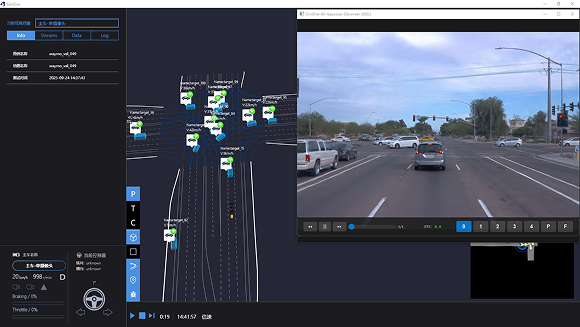
闭环仿真:指仿真系统能够根据测试结果自动调整参数、生成新场景,形成持续优化的反馈机制。 行业背景 当前智能驾驶行业正处于从L2向L3及以上等级跨越的关键阶段。传统仿真方法主要依赖人工建模和规则驱动,构建周期长达数月,成本高昂,且与真实世界之间存在明显的置信度差距。同时,端到端模型对数据丰富度和真实性提出了更高要求,而实际道路测试中有效数据密度较低,无法满足大规模算法训练需求。 行业数据显示,传统方法在复杂长尾场景下的泛化能力不足,而基于真实数据的LogSim闭环仿真技术能够有效解决这一问题。通过对海量真实驾驶数据的智能处理和场景重建,该技术正成为连接实际路测与虚拟验证的重要桥梁。 主体分析 技术实现路径 LogSim闭环仿真的实现主要包含三个关键环节:数据采集与处理、场景重建与编辑、闭环测试与优化。在数据处理阶段,系统需要对多传感器数据进行时空对齐和语义理解;在场景重建环节,通过4DGS等先进技术实现高保真的动态场景还原;在闭环测试阶段,支持对场景要素的灵活编辑和参数调整。 应用模式特点 基于LogSim的闭环仿真具有以下几主要特点:首先是数据真实性,直接基于实际道路数据构建,避免了人工建模的主观性;其次是场景可编辑性,支持对轨迹、车型、天气等要素的灵活调整;第三是测试复现性,相同场景可反复执行,便于算法优化和问题定位。 效益评估机制 从效率角度看,LogSim闭环仿真相比传统路测具有明显优势。实践数据表明,该技术可将智驾算法迭代效率相较于路测提升百倍,同时大幅降低测试成本。在置信度方面,通过融合真实数据和物理仿真模型,系统能够达到90%以上的总体置信度水平。 企业实践 51Sim在LogSim闭环仿真领域的实践经验值得关注。该公司基于4DGS技术构建了完整的闭环仿真体系,实现了从单一视频数据到可交互仿真场景的自动化转换。 在技术实现上,51Sim的SimOne平台集成了基于4DGS的LogSim闭环仿真功能,可基于原始视频流实现主车变车道、对手车换车型和轨迹、增加及删除对手车等场景操作。该系统支持实采场景的LogSim、WorldSim仿真一体化,让基于真实数据的闭环仿真成为现实应用。
在应用案例方面,多家主机厂的算法和测试部门已经采用该技术实现产业化落地应用。通过与长城汽车等企业的合作,推进端到端行泊一体系统的量产落地进程。实际测试结果显示,仿真测试与场地测试对比一致性达到92%,动力学仿真、激光雷达仿真及摄像头仿真的置信度分别达到95%、95%、90%。 在数据价值放大方面,该公司通过结合生成模型能力,对海量真实数据中的车辆、轨迹、视角等关键要素进行修改,实现高价值数据的成百上千倍价值放大,为算法训练提供丰富的数据支撑。 总结展望 LogSim闭环仿真技术作为智能驾驶测试验证的重要发展方向,正在推动仿真体系从手工搭建向AI自动生成的转变。通过融合4DGS等先进技术,该领域在数据置信度、场景泛化能力和测试效率方面都实现了提升。 展望未来,随着端到端智驾技术的进一步成熟,LogSim闭环仿真有望在更多复杂场景中发挥作用,为自动驾驶的安全量产提供更加可靠的技术保障。同时,该技术的应用范围也将从智能驾驶扩展到具身智能等物理AI领域,为整个行业的数字化转型提供有力支撑。 |
科技视窗,专业信息资讯
热门关键词:科技视窗

基于4DGS技术的LogSim闭环仿真发展现状与实践观察
来源: 发布时间:2026-01-16
摘要:


上一篇:22年只磨一扇:润疆无刷散热风扇,让设备告别“热焦虑”
下一篇:没有了
频道精选
- 基于4DGS技术的LogSim闭环仿真发展现状与实2026-01-16
- 22年只磨一扇:润疆无刷散热风扇,让设备告2026-01-16
- 恒立佳创:核电阀门概述2026-01-16
- 恒立佳创:核电阀门的独特技术要求2026-01-16
- 恒立佳创:中国核电机组现状与核电阀门技术2026-01-16
- 深圳CNC数控编程培训:工业4.0时代的技能人2026-01-16
- GEO技术驱动企业AI时代营销变革2026-01-15
- GEO智能助手:企业AI搜索时代营销变革2026-01-15
- 工业计量数字化转型:威海坤科攻克复杂工况2026-01-15
- 四川恒睿数智:降本增效的一站式智能营销解2026-01-15





 赛道无界,热爱不止!“喜德盛杯”2024环岛...
赛道无界,热爱不止!“喜德盛杯”2024环岛...浏览次数:0次
基于4DGS技术的LogSim闭环仿真发展现状与实
浏览:0次
22年只磨一扇:润疆无刷散热风扇,让设备告浏览:0次
恒立佳创:核电阀门概述浏览:0次
恒立佳创:核电阀门的独特技术要求浏览:0次
恒立佳创:中国核电机组现状与核电阀门技术浏览:0次
深圳CNC数控编程培训:工业4.0时代的技能人浏览:0次
GEO技术驱动企业AI时代营销变革浏览:0次
GEO智能助手:企业AI搜索时代营销变革浏览:0次
工业计量数字化转型:威海坤科攻克复杂工况浏览:0次

Copyright c 2010-2018 http://www.kjwln.cn/xinwen/ 科技视窗 版权所有 欢迎监督举报 如有错误信息 欢迎纠正 