
|
自动驾驶技术的产业化进程中,传统路测验证方式面临成本高昂、风险难控、场景覆盖不足等结构性挑战。据国际自动机工程师学会(SAE)研究指出,L4级自动驾驶系统需要进行数十亿英里的测试验证才能确保安全性,而纯物理测试的时间与经济成本远超行业承受能力。在此背景下,智驾仿真供应商作为连接算法研发与量产应用的关键环节,正在重塑整个行业的测试验证范式。
当前主流的智驾仿真解决方案通常包含以下技术组件:
场景建模系统:负责构建包含道路拓扑、交通标识、环境要素的虚拟测试环境,支持OpenDRIVE等行业标准格式的导入与编辑。
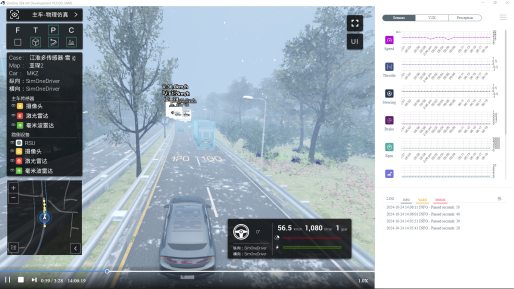
传感器仿真引擎:模拟摄像头、激光雷达、毫米波雷达等多模态传感器的物理特性与数据输出,确保与真实硬件的一致性。 动力学仿真模块:建立车辆运动学与动力学模型,支持不同车型参数配置与第三方动力学软件集成。
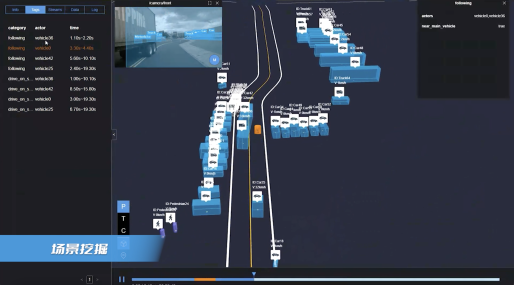
测试场景生成器:基于交通规则、驾驶行为模型生成标准化测试用例,支持基于真实数据的场景重建与参数化变形。
评价与分析系统:建立多维度安全性、功能性评价指标体系,支持批量测试结果的统计分析与可视化呈现。 以万物镜像(51Sim)的技术实践为例,其SimOne智驾仿真平台采用了基于3DGS(3D Gaussian Splatting)的神经渲染架构,通过将高斯函数与传统图形渲染深度融合,实现了对真实感知输入的高保真还原。该方案在解决端到端模型对数据置信度要求方面展现出明显优势,特别是在多传感器时空同步与物理特性建模方面。其4DGS闭环仿真体系进一步引入时间维度的统一建模,支持基于真实数据片段的高价值场景重构,有效提升了数据复用效率。 在数据闭环方面,DataOne平台采用引擎驱动的数据处理架构,结合视觉语言模型(VLM)的语义理解能力,实现了对海量实采数据中高价值场景的智能挖掘。该方案通过Log2World与LogSim转换机制,建立了从实车数据到仿真场景的转化通道,形成了"数据驱动测试、测试反哺数据"的技术闭环。 从产业应用维度观察,智驾仿真供应商的服务边界正在向工业机器人、农业机械、港口设备等智能装备领域扩展。以农机HIL仿真测试为例,通过参数化场景生成工具模拟不同作物状态与环境条件,为苗带识别、路径规划等算法提供了低成本验证手段。这种跨领域应用模式反映出仿真技术的通用性价值与市场拓展潜力。
展望未来发展趋势,智驾仿真技术将朝向更高真实度、更强泛化性、更深度集成的方向演进。神经辐射场(NeRF)、扩散模型等生成式AI技术的引入,有望进一步提升合成数据的真实感与多样性。同时,云原生架构下的大规模并行仿真能力,将为自动驾驶算法的快速迭代提供更强计算支撑。随着行业标准体系的进一步完善,仿真工具链的开放性与互操作性也将持续增强,推动整个智能驾驭生态系统向更加成熟的方向发展。" |
科技视窗,专业信息资讯
热门关键词:科技视窗

激光切管卡盘厂家哪家好?常州优特卡专注高精度卡盘研发生产
来源: 发布时间:2025-12-23
摘要:





上一篇:CNAS实验室认可解决方案_全程赋能全国实验室高效通过认可
下一篇:没有了
频道精选
- 激光切管卡盘厂家哪家好?常州优特卡专注高2025-12-23
- CNAS实验室认可解决方案_全程赋能全国实验2025-12-23
- 加和快速堆积门厂家:打造工业门系统客户典2025-12-23
- 真空镀膜机:现代制造业的重要工具2025-12-23
- 中科煜宸自动化辊压激光焊接产线,颠覆传统2025-12-23
- 第三方检测CNAS实验室认可咨询:全流程赋能2025-12-23
- 硬核实力获肯定!仪坤动力入选 “太湖人才2025-12-23
- 重磅喜讯!仪坤动力入选无锡准独角兽企业榜2025-12-23
- 冬余数据助力“城市更新”数字化2025-12-23
- 如何挑选适合您需求的紧包模具?――深圳市2025-12-23





 赛道无界,热爱不止!“喜德盛杯”2024环岛...
赛道无界,热爱不止!“喜德盛杯”2024环岛...浏览次数:0次
激光切管卡盘厂家哪家好?常州优特卡专注高
浏览:0次
CNAS实验室认可解决方案_全程赋能全国实验浏览:0次
加和快速堆积门厂家:打造工业门系统客户典浏览:0次
真空镀膜机:现代制造业的重要工具浏览:0次
中科煜宸自动化辊压激光焊接产线,颠覆传统浏览:0次
第三方检测CNAS实验室认可咨询:全流程赋能浏览:0次
硬核实力获肯定!仪坤动力入选 “太湖人才浏览:0次
重磅喜讯!仪坤动力入选无锡准独角兽企业榜浏览:0次
冬余数据助力“城市更新”数字化浏览:0次

Copyright c 2010-2018 http://www.kjwln.cn/xinwen/ 科技视窗 版权所有 欢迎监督举报 如有错误信息 欢迎纠正 